

The robotic xylophone has a separate mallet for each note, and each mallet is driven by its own solenoid.
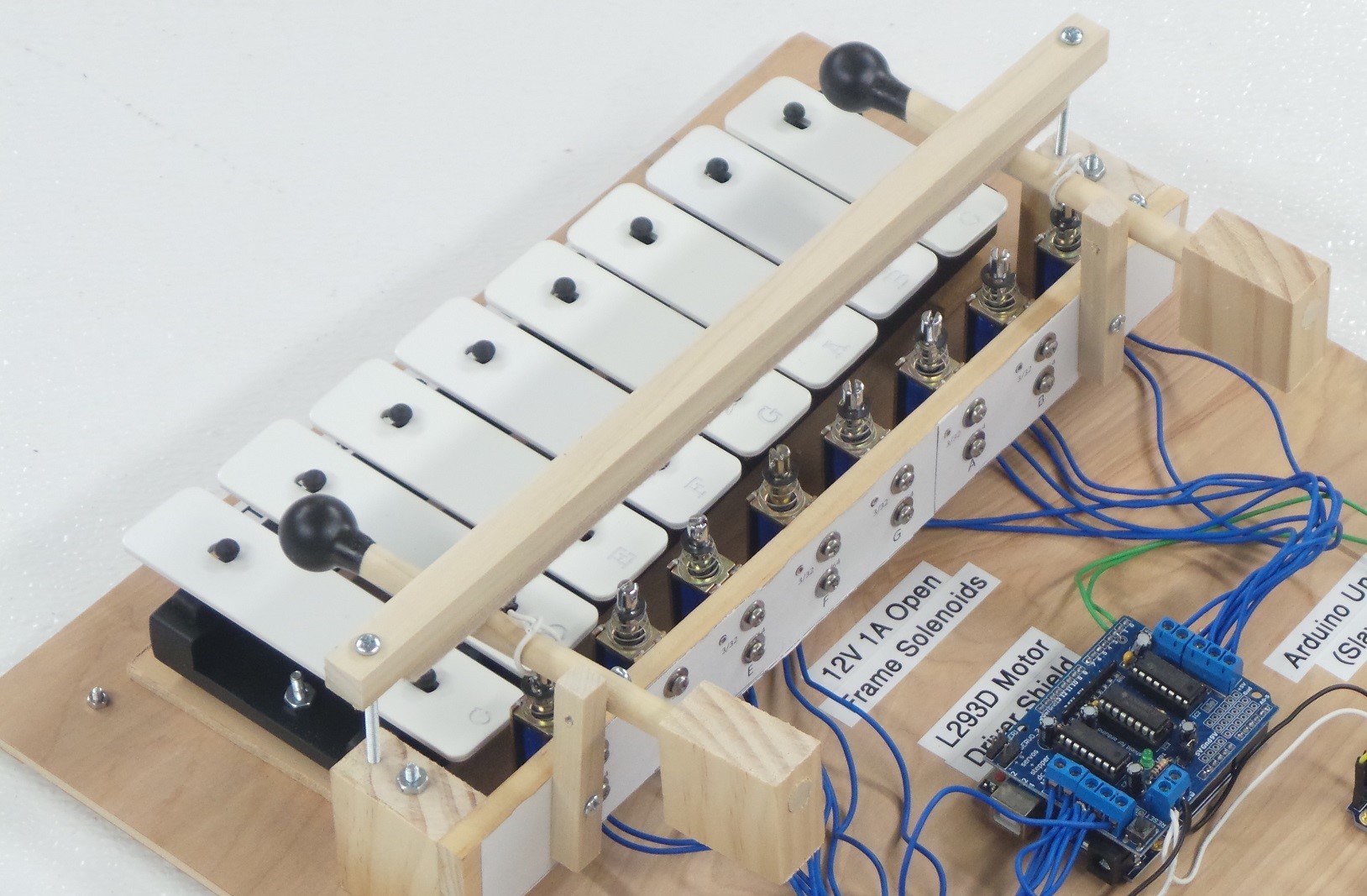
The solenoid is a ZYE1-0530 12V 1A Open Frame solenoid. I selected this solenoid because it had the lowest price of any I could find on-line. (See the Parts –> Solenoids page for more info.)
The mallet consists of a 3/8″ dowel, with a 3/4″ dowel cap, coated in Plasti Dip. There is also a 3/8″ square dowel for support, and a piece of a 3/4″ x 1-1/2″ pine board for a counter-weight. See the assembly instructions for more on how the mallets are constructed. One of the mallets is pictured below.

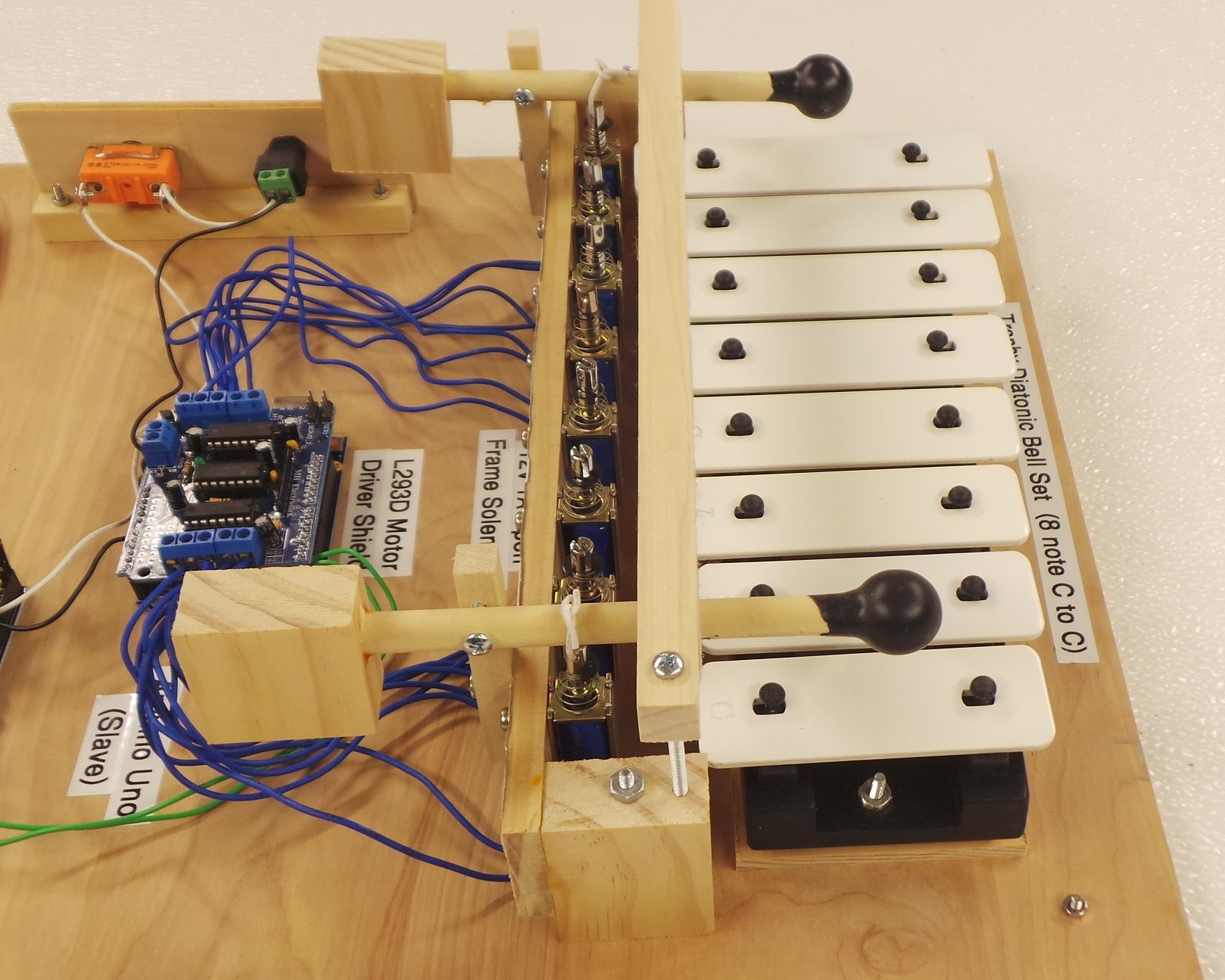
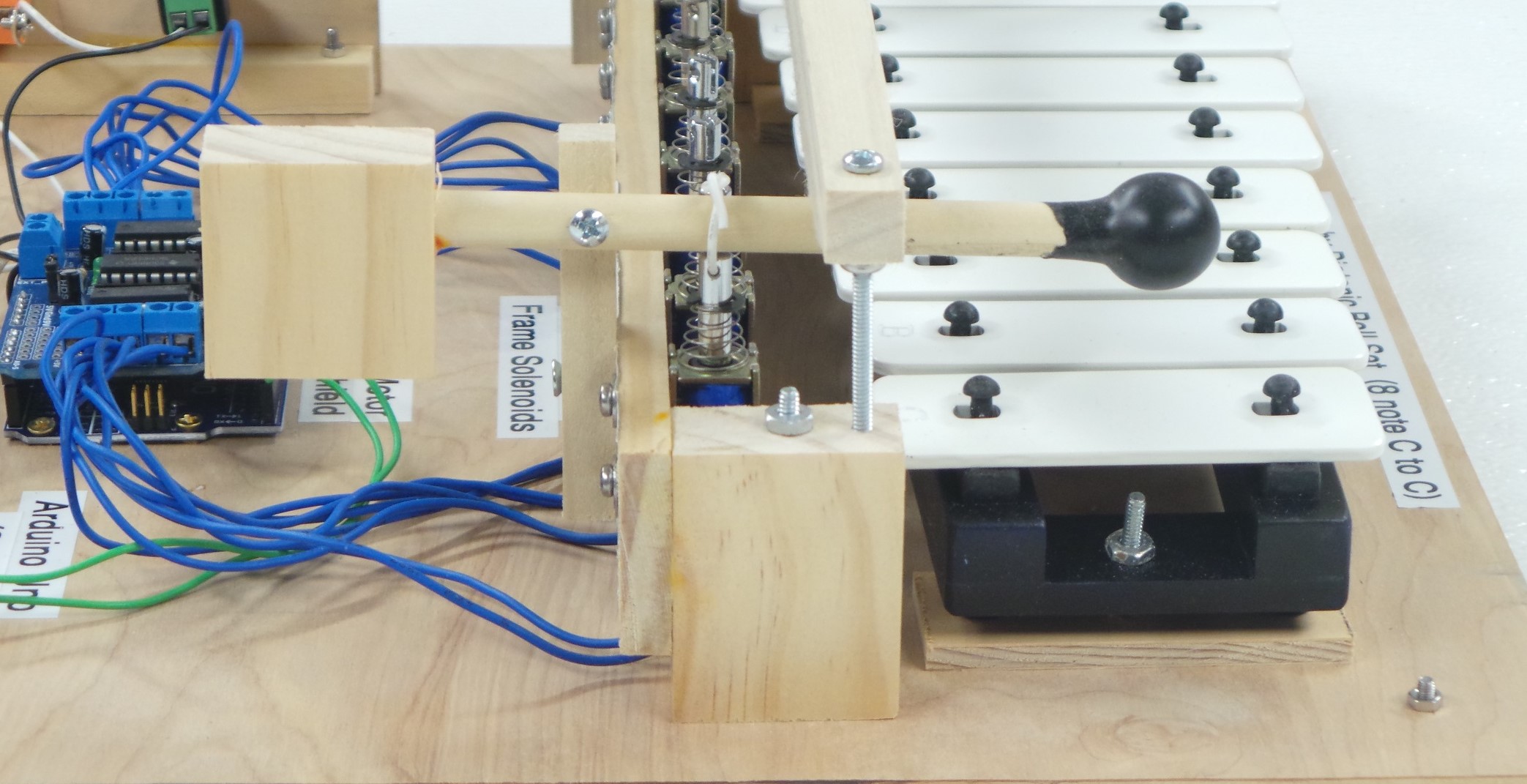
The mallets are secured to a supporting board, so that each mallet head is above one of the xylophone keys. 22 AWG hook-up wire is used to secure each mallet to a solenoid. Trial and error determines the how long each solenoid needs to be energized in order to get a good sound when the mallet strikes the key. Too long, and it will sound clunky due to the xylophone bar not being able to resonate. Too short, and the sound will not be loud enough. I have found 60-80 ms to be a good length of time for the solenoid to be energized. An example of the mallet striking one of the keys is shown in the video below:
The following are some more pictures of the xylophone, mallet, and solenoid assembly:


Next: Motor Driver Shield
